Ergo-Lean (The Main Project of my Ph.D.)

Project Information:
- ERC Starting Grant (Ergo-Lean) - 11/2019 - 10/2024. G.A: 850932
- Role: Ph.D. Student
- When: February 2019 to February 2022
- Laboratory: Human-Robot Interfaces and Interaction (HRII)
- Institute: Italian Institute of Technology
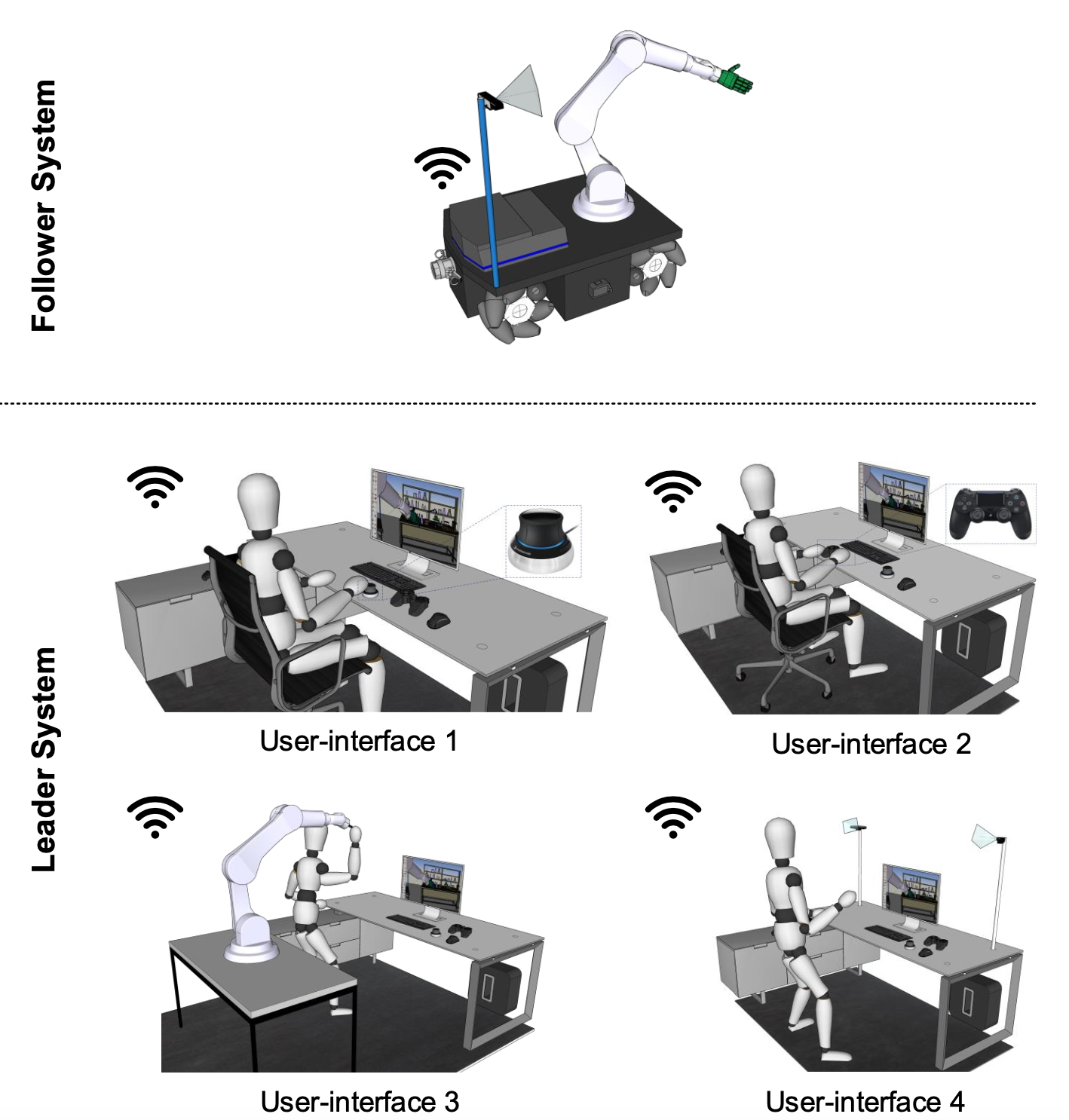
- Thesis Title: A Methodology for Improving the Usability and Ergonomics of Teleoperation Interfaces
Scientific Contributions (+ sign indicates equal contribution):
- Lorenzini, M., Lagomarsino, M., Fortini, L., Gholami, S., & Ajoudani, A. (2023). Ergonomic human-robot collaboration in industry: A review. Frontiers in Robotics and AI, 9, 262.
- Gholami, S., Lorenzini, M., De Momi, E., & Ajoudani, A. (2022). Quantitative physical ergonomics assessment of teleoperation interfaces. IEEE Transactions on Human-Machine Systems, 52(2), 169-180.
- Gholami, S.+, Tassi, F.+, De Momi, E., & Ajoudani, A. (2021, September). A reconfigurable interface for ergonomic and dynamic tele-locomanipulation. In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 4260-4267). IEEE.
- Garate, V. R.+, Gholami, S.+, & Ajoudani, A. (2021). A scalable framework for multi-robot tele-impedance control. IEEE Transactions on Robotics, 37(6), 2052-2066.
- Gholami, S., Garate, V. R., De Momi, E., & Ajoudani, A. (2020, October). A probabilistic shared-control framework for mobile robots. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 11473-11480). IEEE.
- Gholami, S., Garate, V. R., De Momi, E., & Ajoudani, A. (2020, August). A shared-autonomy approach to goal detection and navigation control of mobile collaborative robots. In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 1026-1032). IEEE.