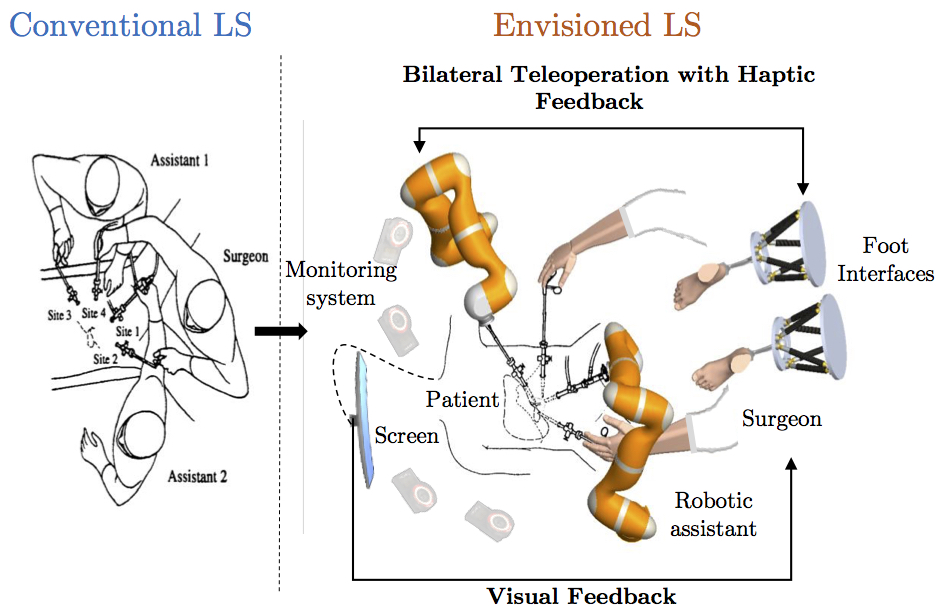
Four-Handed Human Robot Manipulation for Laparoscopic Surgery
Project Information:
- Hasler Foundation (Project Page)
- Role: Postdoctoral Researcher
- When: March 2022 to July 2023
- Laboratory: Learning Algorithms and Systems Laboratory (LASA)
- University: École Polytechnique Fédérale de Lausanne (EPFL, Switzerland)
Scientific Contributions:
- Gholami, S., Munier, L., Bouri, M. and Billard, A. (2025). Four-handed solo laparoscopic anastomosis with the support of supernumerary robotic arms. IEEE Engineering in Medicine and Biology Society (EMBC). Copenhagen, Denmark.
- Gholami, S., Munier, L., Bouri, M. and Billard, A., Four-Handed Solo Laparoscopic Anastomosis with the Support of Supernumerary Robotic Arms, International Conference on Robotics and Automation (ICRA40), Rotterdam, the Netherlands.
- Gholami, S., Munier, L., Cabasse, C., Bouri, M., and Billard, A., 2023, Feet-Driven 4-Arm Manipulation: A Novel Approach for Solo Laparoscopic Anastomosis, CURAC 2023 in Basel. Extended abstract paper (best paper award)
- Gholami, S., Munier, L., Cabasse, C., Bouri, M., and Billard, A., 2023, Four-Arms Manipulation: a New Way to Implement Robotic Surgery, The Society for the Neural Control of Movement (NCM) in Canada. Abstract paper (poster presentation)